5. 详细时序图¶
此处列举了每个功能的详细时序图
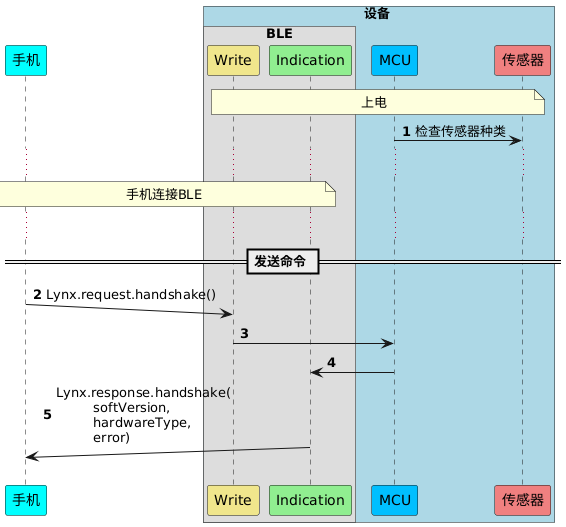
5.1. 握手¶
数据格式定义见: 握手格式(handshake)
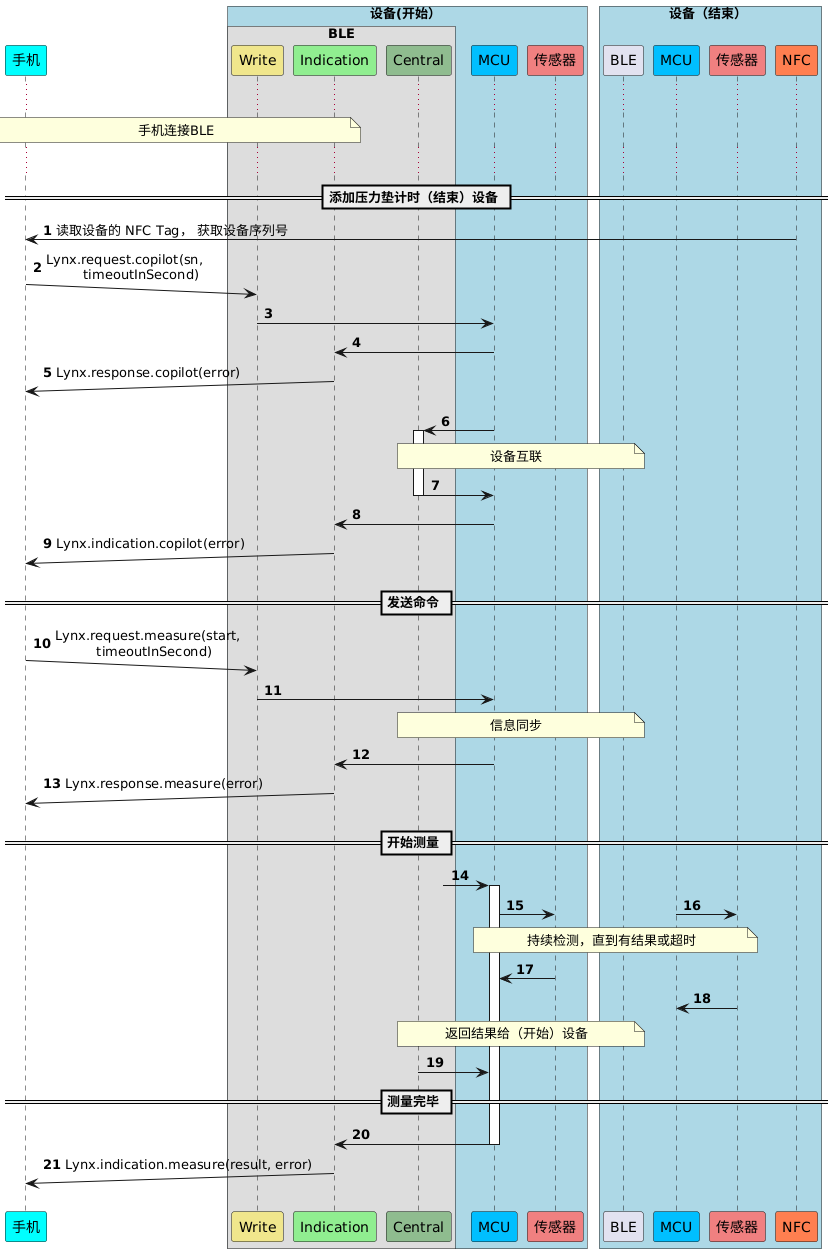
5.2. 压力垫计时¶
此功能涉及到 副驾格式(copilot) 和 测量格式(measure)
设备收到测量命令之后开始采集传感器。
如果在超时时间内主副压力垫依次检测到松开和踩上,那么会返回结果。 最终的 result 是从主压力垫松开到副压力垫踩上的时间,单位是毫秒。
如果未能在超时时间内采集到合法的传感器信号,那么会返回对应的错误。
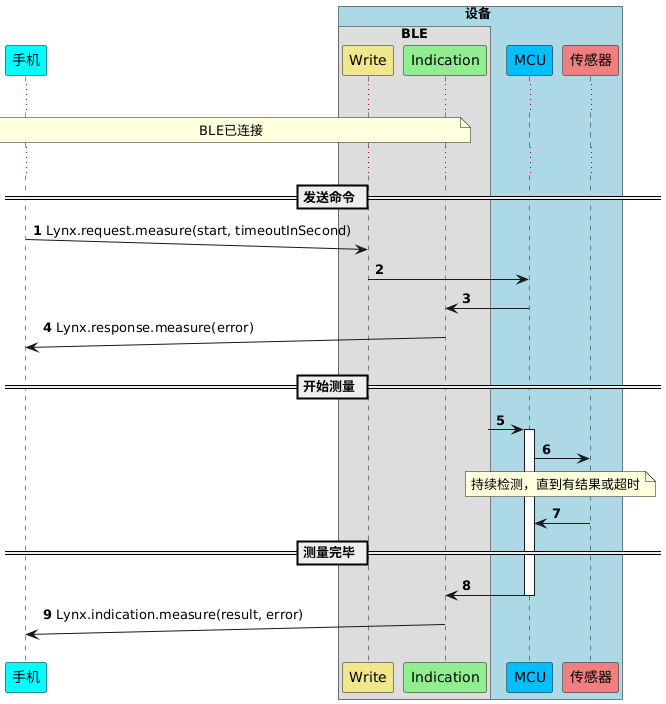
5.3. 坐位体前屈测距¶
此功能涉及到 测量格式(measure)
设备收到测量命令之后开始采集传感器。
如果在超时时间内遮挡板移动至少1cm然后停止至少0.4秒,那么设备会返回最终位置的结果。 最终的 result 是传感器和遮挡板之间的距离,单位是毫秒。
如果未能在超时时间内采集到合法的传感器信号,那么会返回对应的错误。
5.4. 跳远测距¶
时序图同 坐位体前屈测距.
设备收到测量命令之后开始采集传感器。
如果在超时时间内检测到有传感器被遮挡,并且位置稳定约0.5秒,那么设备会返回最终位置的结果。 最终的 result 是遮挡物的最近端和最远端的位置,起点从光栅接线端开始计算。 远端占高16位,近端占低16位。单位均是毫米。
如果未能在超时时间内采集到合法的传感器信号,那么会返回对应的错误。
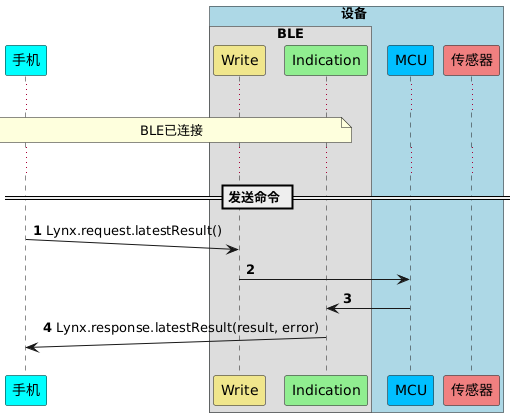
5.5. 获取最后一次结果¶
数据格式定义见: 最后结果格式(latest result)
返回的是上一次测量结果和错误。
备注
如果已经开始新的测量,那么上一次的结果会被清空,即使本次还没有测量结束。